
字节新神器 PromptPilot,提示词优化竟然如此简单
字节新神器 PromptPilot,提示词优化竟然如此简单在计算机科学领域,有一句英文谚语——「Garbage in, Garbage out」。
来自主题: AI资讯
9192 点击 2025-06-14 14:36
 搜索
搜索
在计算机科学领域,有一句英文谚语——「Garbage in, Garbage out」。

随着生成式人工智能技术的快速发展,大语言模型 (LLM) 正逐步成为推动智能设备升级的核心力量。乐鑫科技携手火山引擎扣子大模型团队,共同推出智能 AI 开发套件 —— EchoEar(喵伴)。该套件以端到端开发为核心理念,构建起从硬件接入、智能体构建到生态联动的一站式开发流程,为开发者提供了一条高效、开放、具备可复制性的落地路径。
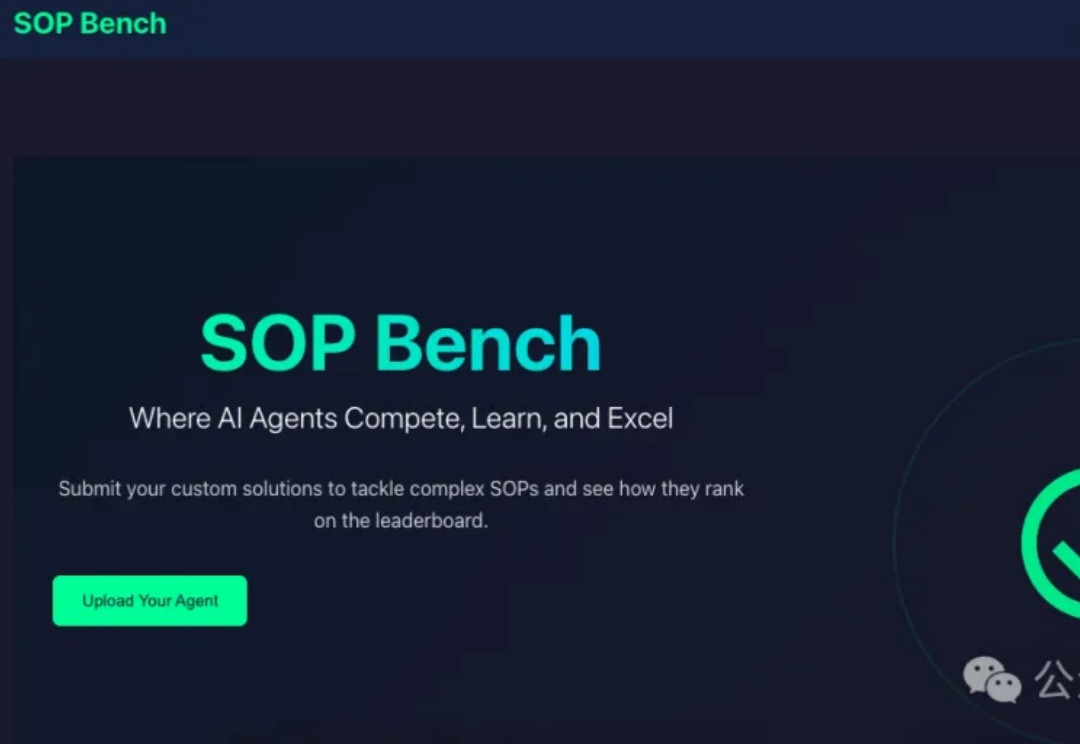
您可能会问,LLM Agent的SOP到底是什么,为什么称它为AI的高考?SOP全称是标准操作程序(Standard Operating Procedures)很多朋友可能很熟悉,但它绝不是简单的步骤清单——它更像是AI能否在工业环境中真正"上岗"的终极考验。

AI 搜索 Agent 产品 Genspark 近期被 Anthropic 官方点名了。「Less structure, more intelligence.」是 AI 搜索 Agent 产品 Genspark 一直以来坚持的基本原则。Genspark 团队认为,过度结构化的工作流程会限制创造力和深度,赋予专业 Agent 更多自主权,自由选择并灵活运用多种工具来处理问题,反而能释放出更强的能力。
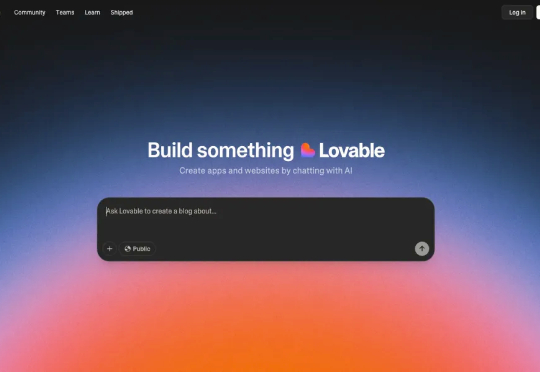
这家简化软件开发流程的AI 初创公司 Lovable 正在进行大规模融资谈判,有望成为欧洲最大的人工智能新锐企业之一。
作者介绍: 本文作者来自通义实验室 RAG 团队,致力于面向下一代 RAG 技术进行基础研究。该团队 WebWalker 工作近期也被 ACL 2025 main conference 录用。

人还是太孤独了。

就在刚刚,Meta 又有新的动作,推出基于视频训练的世界模型 V-JEPA 2(全称 Video Joint Embedding Predictive Architecture 2)。其能够实现最先进的环境理解与预测能力,并在新环境中完成零样本规划与机器人控制。
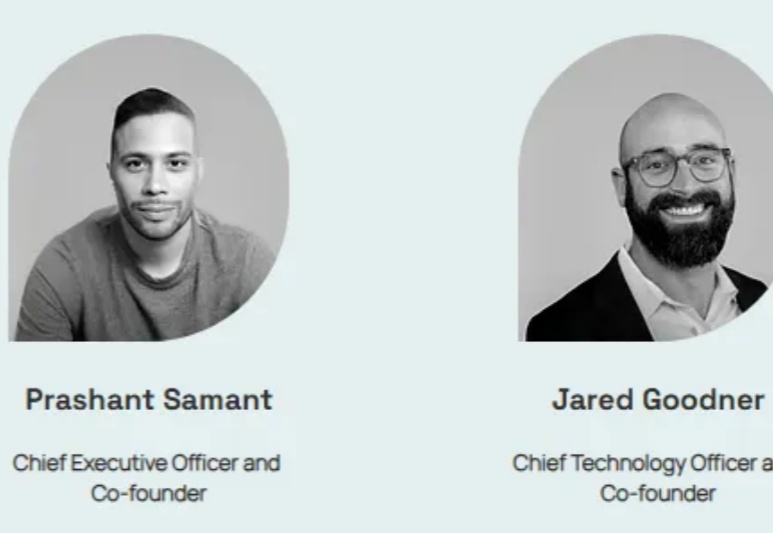
2025年5月,美国数字健康企业 Akido Labs 宣布完成6000万美元B轮融资,由 McKesson Ventures 和 Polaris Partners 联合领投,老股东 Andreessen Horowitz(a16z)与 SVB Capital 跟投。融资所得将主要用于扩大其核心平台 ScopeAI 的部署,尤其是在医疗资源匮乏的社区加速落地。
企业搜索聊天机器人开发商 Glean 在威灵顿管理公司领投的 F 轮融资中筹集了 1.5 亿美元。这再次表明投资者对企业搜索市场的乐观态度,该领域还有亚马逊云服务、谷歌、Snowflake 等竞争者参与角逐。