Sebastian Raschka 新书《从头开始推理》抢先看,揭秘推理模型基础
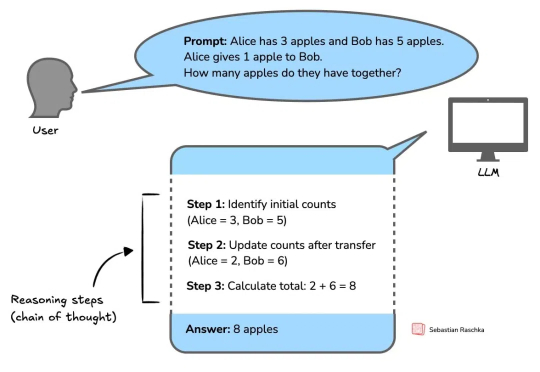
Sebastian Raschka 新书《从头开始推理》抢先看,揭秘推理模型基础推理模型发展正盛,著名 AI 技术博主 Sebastian Raschka 也正在写一本关于推理模型工作方式的新书《Reasoning From Scratch》。
来自主题: AI技术研报
9096 点击 2025-05-06 13:58
 搜索
搜索
推理模型发展正盛,著名 AI 技术博主 Sebastian Raschka 也正在写一本关于推理模型工作方式的新书《Reasoning From Scratch》。

“定焦One”选取了市面上几家热门的AI榜单,分别是AI产品榜、Xsignal、AIGCRank、新榜,综合了月活(MAU)、日活(DAU)、下载量三个比较重要的维度,以及从业者的观点,梳理出1~3月全球AI应用的前二十及国内前十,有了以下发现:
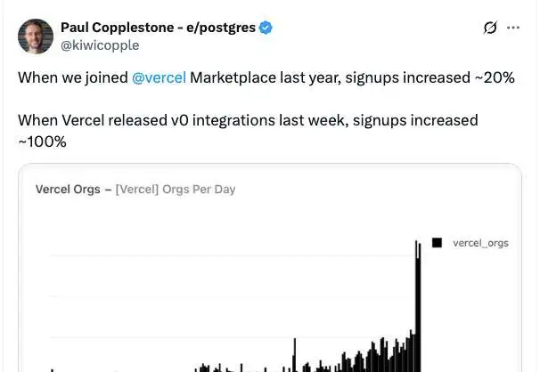
本周,Supabase 的发展已经迎来高光时刻:据《财富》杂志报道, Supabase 宣布完成 2 亿美元 D 轮融资,投后估值 20 亿美元。本轮由 Accel 领投,Coatue、Y Combinator、Craft Ventures 及老股东 Felicis 参投。距离其上一轮 8000 万美元融资仅过去 7 个月,累计融资已达近 4 亿美元。

5月19-23日,ICRA 2025将在美国亚特兰大举行。届时,第一届“探索机器人能力边界双臂机器人挑战赛(WBCD,What Bimanual Can Do)”决赛也将在ICRA 2025现场拉开帷幕。
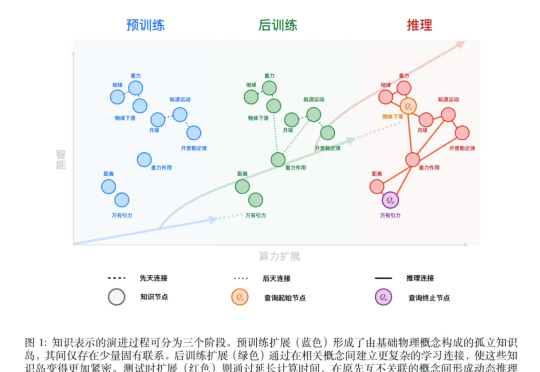
无论你是技术创造者还是使用者,理解这场认知革命都至关重要。我们正在从「AI as tools」向「AI as thinking partners」转变,这不仅改变了技术的能力边界,也改变了我们与技术协作的方式。

如果你曾在夜幕降临时,慌忙围出一块勉强能放下一张床的木屋,躲避午夜里徘徊的怪物;如果你曾在那片方块拼接的世界里,复现从自家校园到逶迤阿房的一切建筑;如果你曾沿着蜿蜒的矿道深挖,只为追寻岩浆洞穴里那抹耀眼的蓝绿色……那么,你一定懂得《我的世界》(Minecraft)的魅力!
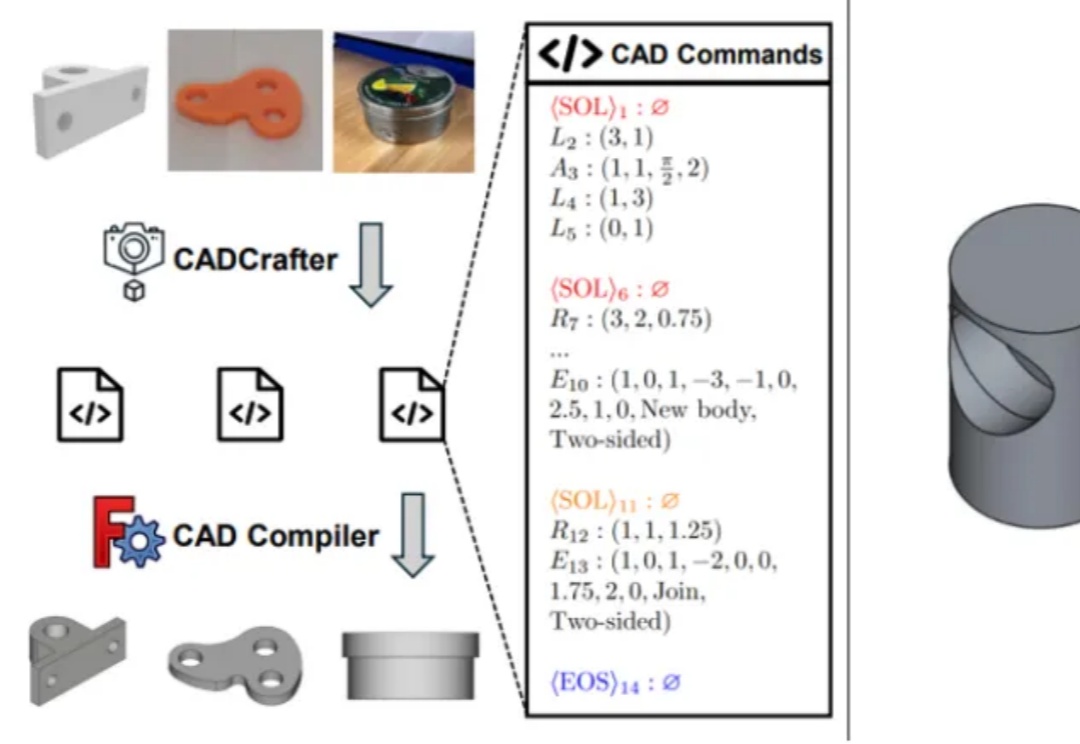
单张图直接就能生成可编辑的CAD工程文件!
大型语言模型 (LLM) 在软体机器人设计领域展现出了令人振奋的应用潜力。
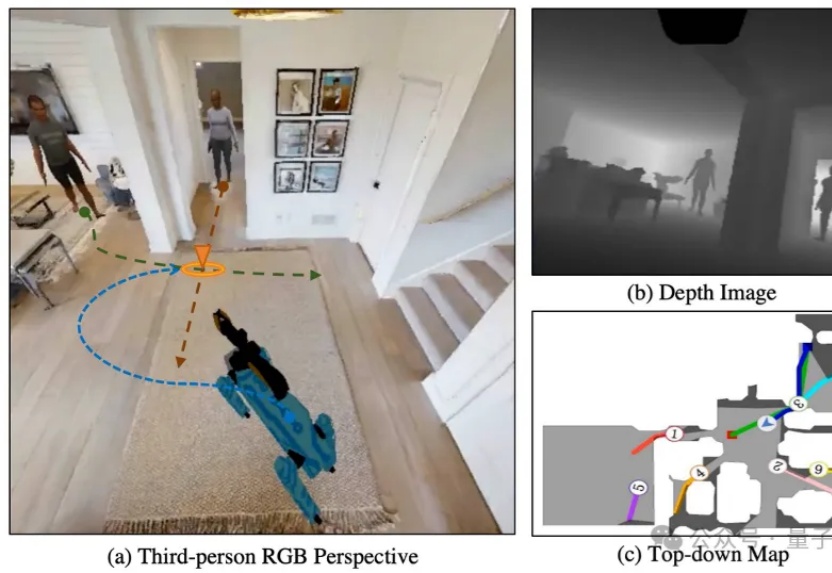
机器人落地复杂场景,社交导航能力一定是避不开的关键一点。
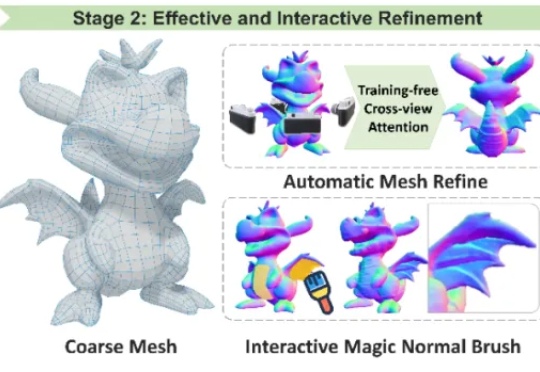
香港科技大学谭平教授团队在 CVPR 2025 发表两项三维生成技术框架,核心代码全部开源,助力三维生成技术的开放与进步。其中 Craftman3D 获得三个评委一致满分,并被全球多家知名企业如全球最大的多人在线游戏创作平台 Roblox, 腾讯混元 Hunyuan3D-2,XR 实验室的 XR-3DGen 和海外初创公司 CSM 的 3D 创作平台等重量级项目的引用与认可。