
刚刚,逐际动力放出一段Demo,Figure:睡不着啊
刚刚,逐际动力放出一段Demo,Figure:睡不着啊昨天刚完成2亿美元Pre-IPO轮融资,逐际动力没有急着讲资本故事,而是立马甩出一段全尺寸人形机器人Oli全自主做家务的视频:
来自主题: AI技术研报
7732 点击 2026-07-16 10:30
 搜索
搜索
昨天刚完成2亿美元Pre-IPO轮融资,逐际动力没有急着讲资本故事,而是立马甩出一段全尺寸人形机器人Oli全自主做家务的视频:

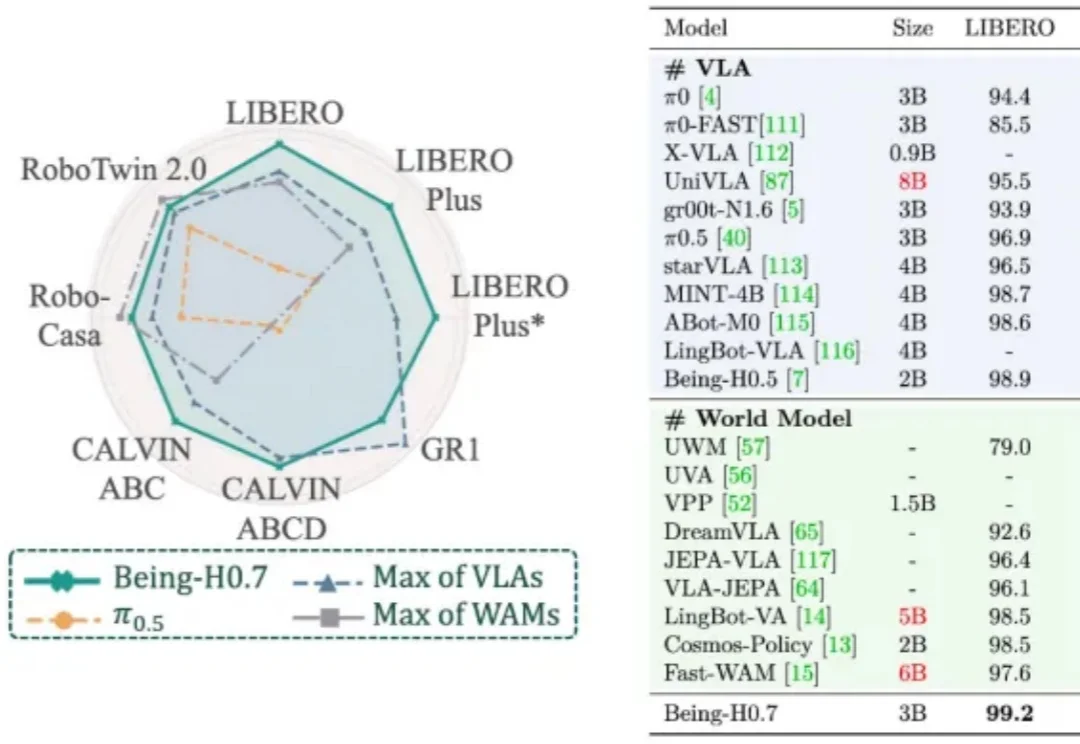
WorldArena 1.0 的核心意义,在于将世界模型评测从 “好不好看” 推进到 “是否真的有用”。它不再只关注视频观感,而是把物理一致性、可控性、3D 准确性和具身任务功能性纳入统一评测框架,使许多看似流畅的生成结果第一次在机器人具身任务中接受检验。

银犀 Rhino-Z1,全尺寸行业四足机器人,核心参数直接打进头部区间,多项硬指标反超。发布它的是 Zenbot 真保 —— 特斯拉供应链产业资本组团押注、运营首年订单近亿元的具身智能公司。
过去两年,人形机器人赛道的竞争焦点,正从整机硬件进一步延伸到模型能力。

Z Potentials 获悉,近日,国内具身触觉头部企业千觉机器人科技(上海)有限公司(以下简称“千觉机器人”或“Xense Robotics”)完成亿元融资。本轮融资由顶级具身智能产业方与吉德电器战略投资,新锐投资机构天季资本共同投资。

威联机器人科技(深圳)有限公司(以下简称“MOVA LINCO”)近日完成数千万元天使融资。融资资金将主要用于AI算法底层技术研发、完善产品量产体系,以及全球化渠道布局和家庭AI生态的持续建设。

不教AI认手,而是从视频世界模型里直接「读」出双手:三大基准SOTA,让百万小时野生视频第一次能变成机器人的操作教材。

机器人正在进厂打工……
近期,围绕「世界模型」的讨论持续升温。机器人、自动驾驶、视频生成、具身智能等多个方向都在频繁使用这一概念,相关系统不断出现,演示形式日益丰富,评价指标也越来越多。伴随这一趋势,一个基础问题变得格外重要:当一个模型被称为「世界模型」时,人们究竟在评价什么?

过去几年,大语言模型几乎成为了AI的代名词。从ChatGPT到Google DeepMind推出的Gemini,从Anthropic开发的Claude到中国的DeepSeek,人们讨论更多的是聊天机器人、推理能力和生成内容。但如果问Google DeepMind CEO、2024年诺贝尔化学奖得主Demis Hassabis(下简称“哈萨比斯”)