
本周 AI 项目推荐:UXBench、MemLens、RoadmapBench…下一代模型,需要下一代 Benchmark
本周 AI 项目推荐:UXBench、MemLens、RoadmapBench…下一代模型,需要下一代 Benchmark我们最近在重新思考一件事:到底什么样的 Benchmark,才值得今天继续做?
来自主题: AI资讯
6274 点击 2026-06-22 09:37
 搜索
搜索
我们最近在重新思考一件事:到底什么样的 Benchmark,才值得今天继续做?

当AI神话被账本照亮,最刺眼的真相终于浮出水面。退潮时刻,狂欢结束。探照灯打过来,谁在裸泳,一目了然。

具身智能领域的资本,正在涌向机器人的“大脑”。
就在最近,OpenAI扔出一篇重磅论文。他们发现,只教AI好好看病,它写代码居然也不作弊了。方法简单到离谱:拿5%的训练数据,教模型在回答健康问题时诚实、谨慎、知错能改。
斯坦福胡佛研究所追踪了 DeepSeek 七篇论文背后 356 名研究者的完整职业轨迹。美国培养出的最优秀 AI 人才正在大规模回流中国,而中国本土管道已经能独立产出前沿模型的核心贡献者。
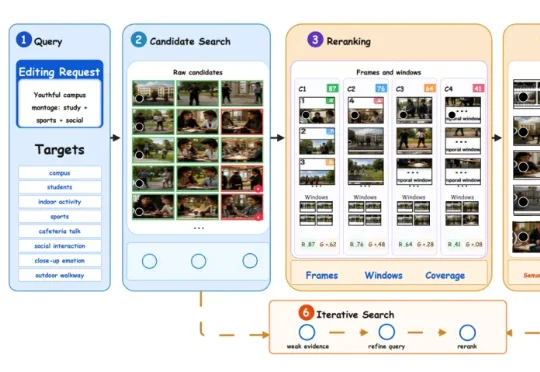
近年来,大语言模型(LLMs)在长篇视觉叙事中展现出卓越潜力,生产方式正迅速从单一模型生成转向面向生产的智能体系统。但长视频剪辑仍然是一个极难控制的长期任务。模型有时会在缺乏素材依据的情况下强行生成,甚至在面对明显断档的转场或人物不一致时依然“盲目拼接”。
据最新独家爆料,谷歌目前正在紧锣密鼓地对即将发布的重磅大语言模型Gemini 3.5 Pro进行高强度的激进迭代,在正式揭晓之前,内部预计还会测试更多的版本。
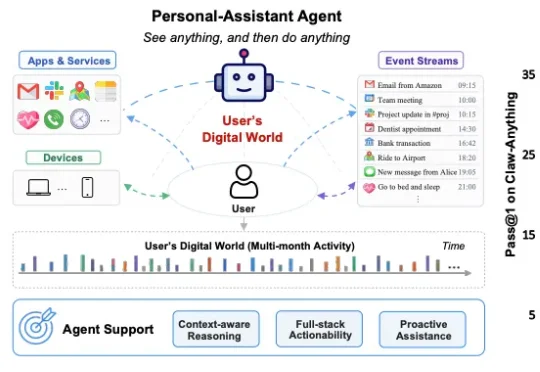
我们相信,常驻型 (always-on) AI 助理的下一次飞跃,不在于把某一个模型单点调得更聪明,而在于扩展智能体的上下文 (Scaling Agent Context)—— 不断拓宽助理能够持续 "感知 — 推理 — 执行" 的范围,作为生活连接器连接用户的信息孤岛,直到它能接管用户的整个数字世界。
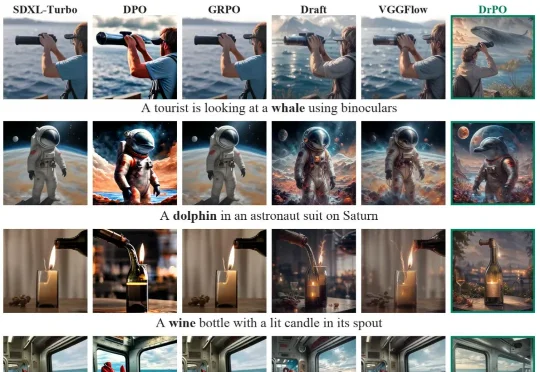
来自西湖大学和香港中文大学(深圳)的团队沿着这一思路提出 Drifting Preference Optimization(DrPO),把漂移场用于单步文生图模型的偏好后训练。在 DrPO 中,奖励只负责对候选图像排序,不参与反向传播。具体而言,针对同一个文本提示词,当前模型生成一组候选图像。高分样本在特征空间中产生吸引,低分样本产生排斥,并结合参考模型约束给出模型的更新方向。

如今,CameraSquad 的出现,让这种多视角一致的视频生成与 3D 世界状态构建成为现实。近日,中国科学院大学高林研究员团队联合卡迪夫大学、香港科技大学和快手可灵团队,提出了一种面向多轨迹并行生成的相机可控视频生成方法 CameraSquad [1],相关论文已被 ACM SIGGRAPH 2026 录用。