全球看中国,灵初智能用10万小时人类数据写下具身智能的中国答案
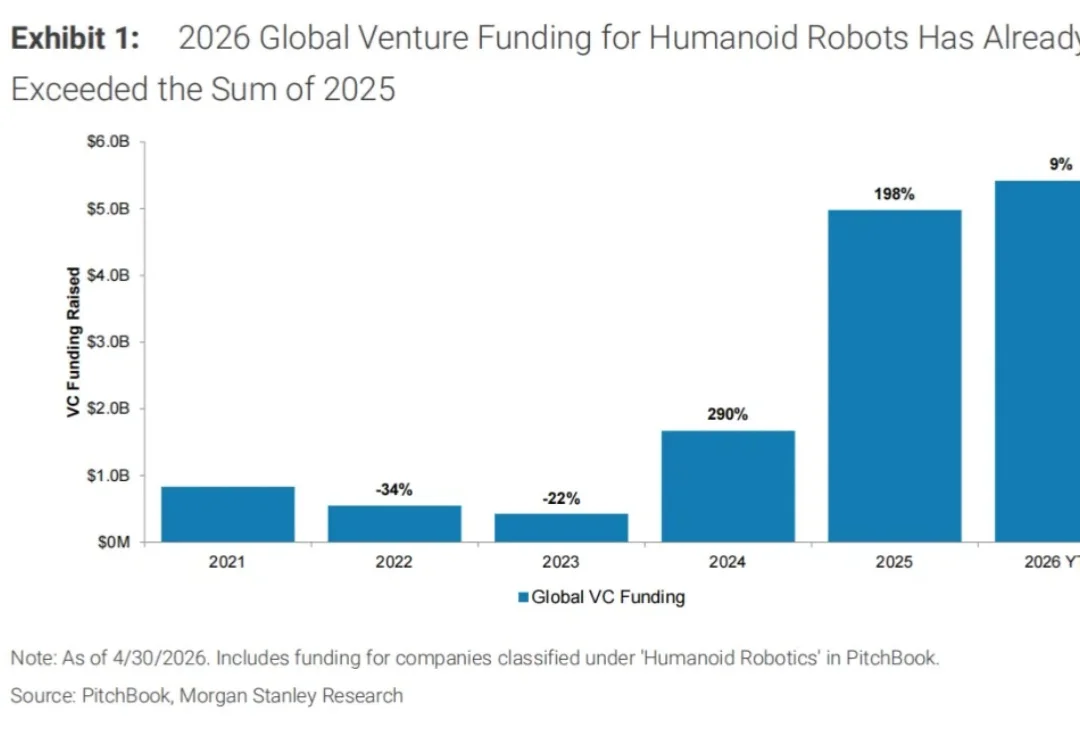
全球看中国,灵初智能用10万小时人类数据写下具身智能的中国答案2026 年,“世界模型” 正在成为具身智能行业的高频词。越来越多公司开始将自己的技术路线表述为机器人世界模型,试图用可学习的环境模型提升机器人训练效率。
来自主题: AI资讯
10503 点击 2026-05-14 16:02
 搜索
搜索
2026 年,“世界模型” 正在成为具身智能行业的高频词。越来越多公司开始将自己的技术路线表述为机器人世界模型,试图用可学习的环境模型提升机器人训练效率。

4 月 10 日晚,灵初智能发布了大模型、数据集与合作计划:包括策略模型 Psi-R2、世界模型 Psi-W0,以及总规模近 10 万小时的人类操作数据。它想回答的问题也很直接 —— 当真机数据不再是唯一解,机器人还能靠什么继续 scaling?

具身智能的胜负手,可能并不在机器人本身。
用「无本体数采」的方式训练具身模型,灵初智能的这条路径是 VLA 之后行业最热的方向之一。

灵初智能选择了一条更为激进的技术路线:「人类中心(Human-Centric)」。他们自主研发了全球首个灵巧手真实世界数采引擎Psi-SynEngine。

灵初智能发布全球首个具身原生人类数据采集方案 Psi-SynEngine。该方案由灵初智能全栈自研,包含便携式外骨骼触觉手套数采套装、大规模 in the wild 数采数据管线、基于世界模型和强化学习的跨本体数据迁移模型,并已率先将采集到的人类数据应用于物流等真实场景。
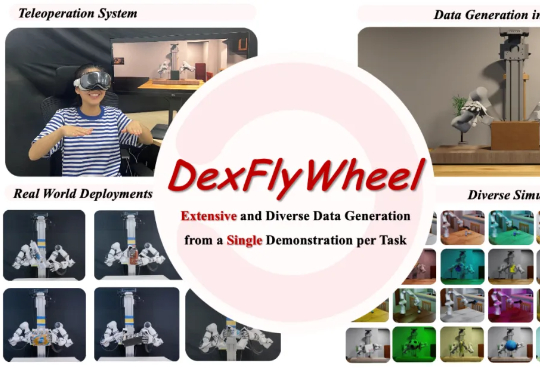
近期,北京大学、哈尔滨工业大学联合 PsiBot 灵初智能提出首个自我增强的灵巧操作数据生成框架 ——DexFlyWheel。该框架仅需单条演示即可启动任务,自动生成多样化的灵巧操作数据,旨在缓解灵巧手领域长期存在的数据稀缺问题。目前已被 NeurIPS 2025 接受为 Spotlight(入选率约 3.2%)

每只手21个自由度,支持16主动自由度,具备高精度操作能力。