
机器人开可乐发扑克有多难?聊聊灵巧手的硬件与算法
机器人开可乐发扑克有多难?聊聊灵巧手的硬件与算法2026年,人形机器人将迎来规模化量产的元年。最清晰的信号来自特斯拉,“金色擎天柱”Optimus Gen 3预计在2026年第一季度亮相,并计划在年底前建成产能高达100万台的生产线。马斯克曾多次表示,特斯拉未来约80%的价值来自这里,而非汽车。而“擎天柱”的攻关关键,正在于它的“手与前臂”。
来自主题: AI资讯
10726 点击 2026-01-04 10:15
 搜索
搜索
2026年,人形机器人将迎来规模化量产的元年。最清晰的信号来自特斯拉,“金色擎天柱”Optimus Gen 3预计在2026年第一季度亮相,并计划在年底前建成产能高达100万台的生产线。马斯克曾多次表示,特斯拉未来约80%的价值来自这里,而非汽车。而“擎天柱”的攻关关键,正在于它的“手与前臂”。

灵初智能发布全球首个具身原生人类数据采集方案 Psi-SynEngine。该方案由灵初智能全栈自研,包含便携式外骨骼触觉手套数采套装、大规模 in the wild 数采数据管线、基于世界模型和强化学习的跨本体数据迁移模型,并已率先将采集到的人类数据应用于物流等真实场景。
做灵巧手如果不会用工具,跟咸鱼(夹爪)有什么区别?
机器人使用灵巧手帮人类在工厂里拧螺丝,在家里切菜做饭的一天何时可以到来?为了实现这一愿景,旨在解决灵巧操作技能 sim-to-real 难题的 DexNDM 应运而生。
在灵巧手通用抓取的研究中,由于动作空间维度高、任务具有长程探索特征且涉及多样化物体,传统强化学习(RL)面临探索效率低、奖励函数及训练过程设计复杂等挑战。
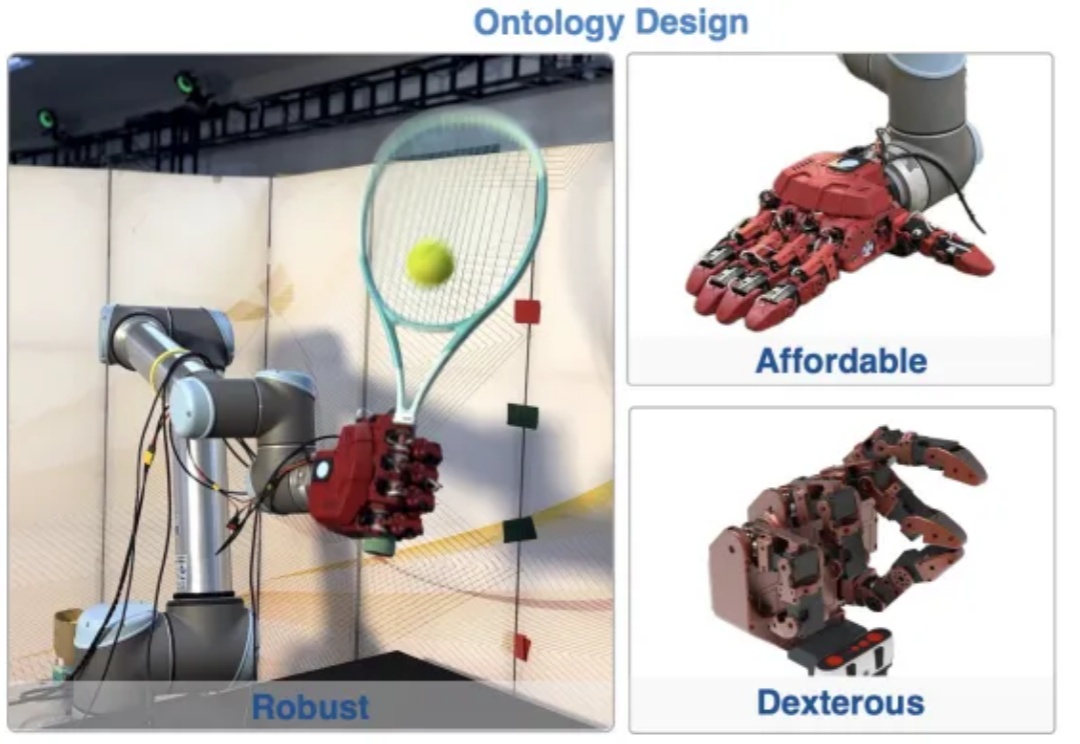
在最近的一篇 NeurIPS 25 中稿论文中,来自中山大学、加州大学 Merced 分校、中科院自动化研究所、诚橙动力的研究者联合提出了一个全新开源的高自由度灵巧手平台 — RAPID Hand (Robust, Affordable, Perception-Integrated, Dexterous Hand)。

灵巧手技能+1,能帮女友拧瓶盖了!
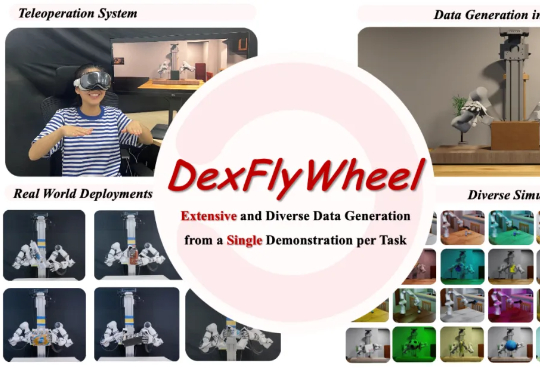
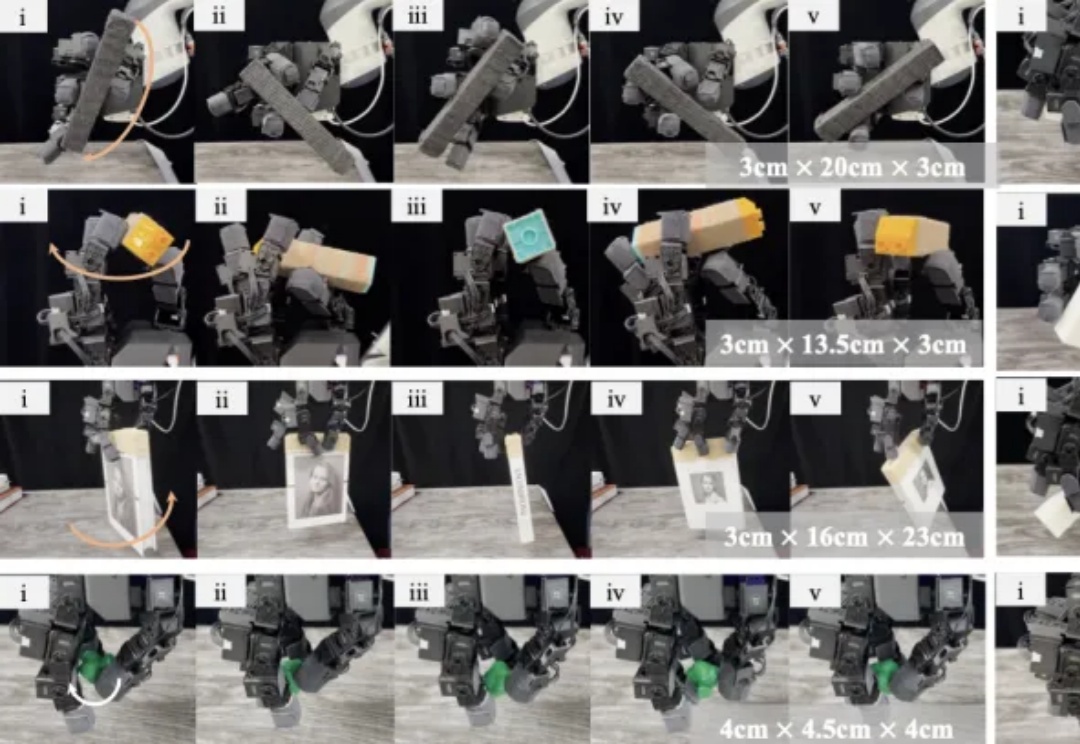
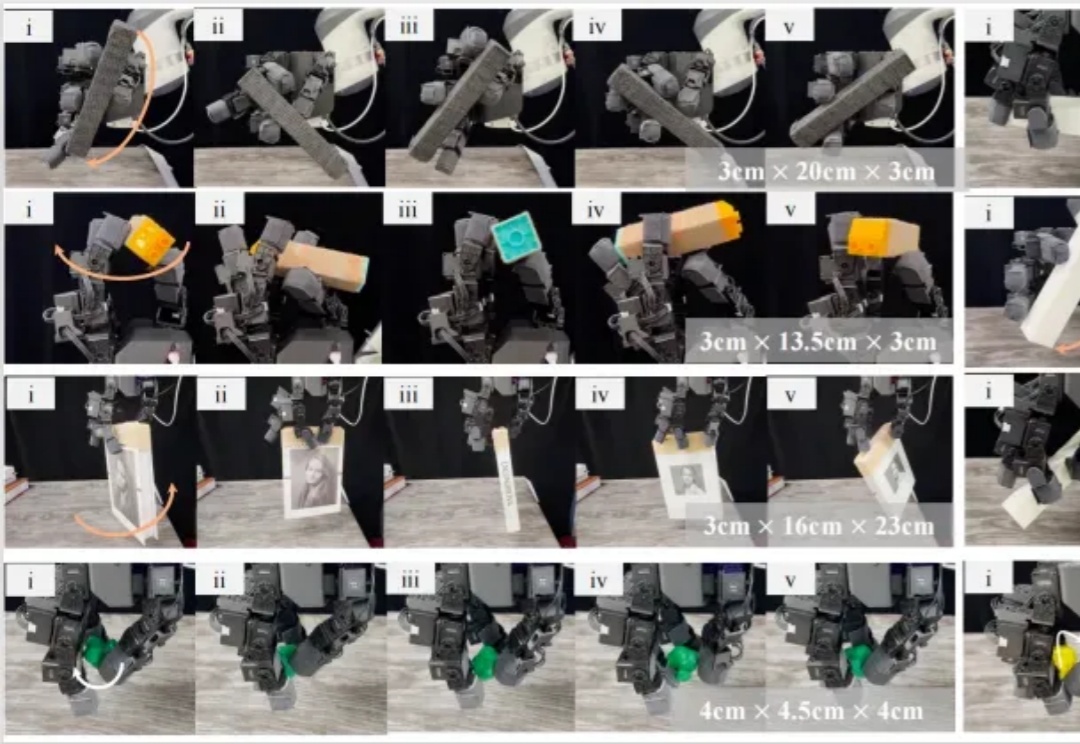
近期,北京大学、哈尔滨工业大学联合 PsiBot 灵初智能提出首个自我增强的灵巧操作数据生成框架 ——DexFlyWheel。该框架仅需单条演示即可启动任务,自动生成多样化的灵巧操作数据,旨在缓解灵巧手领域长期存在的数据稀缺问题。目前已被 NeurIPS 2025 接受为 Spotlight(入选率约 3.2%)

来自斯坦福大学、哥伦比亚大学、摩根大通AI研究院、卡耐基梅隆大学、英伟达提出了一种数据采集与策略学习框架DexUMI——利用人手作为自然接口将灵巧操作技能迁移至多种灵巧手。该框架通过硬件与软件的双重适配,最大限度缩小人手与各类灵巧手之间的具身差异。

Figure人形机器人首秀,靠神经网络叠衣服! 在没有任何架构改变、仅增加了数据的情况下,就让原本在物流场景干活的它,轻松习得了新技能。