魔法原子进军硅谷背后:世界模型野望与生态卡位
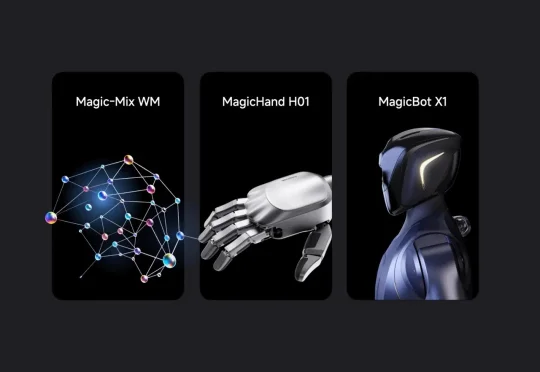
魔法原子进军硅谷背后:世界模型野望与生态卡位魔法原子在会上推出了新一代人形机器人 MagicBot X1 和灵巧手 MagicHand H01,而且第一次把其世界模型 Magic-Mix、数据生成与训练反馈闭环,作为一套完整的具身智能底层能力集中展示出来。
来自主题: AI资讯
7689 点击 2026-05-01 11:09
 搜索
搜索
魔法原子在会上推出了新一代人形机器人 MagicBot X1 和灵巧手 MagicHand H01,而且第一次把其世界模型 Magic-Mix、数据生成与训练反馈闭环,作为一套完整的具身智能底层能力集中展示出来。

如果你看过最近的人形机器人演示,大概率会被它们的运动能力震撼到。
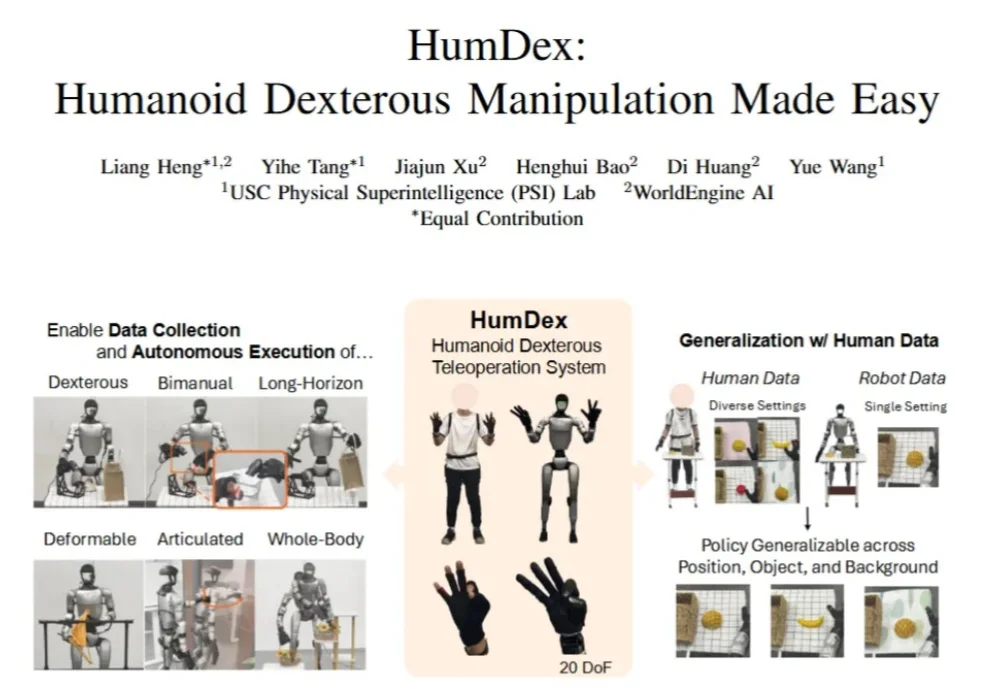
人形机器人全身灵巧操作是通向通用具身智能的核心目标之一。在这一愿景下,机器人不仅需要双臂与高自由度多指灵巧手的精细协调,还需要与全身位姿(如行走、弯腰)进行动态配合。
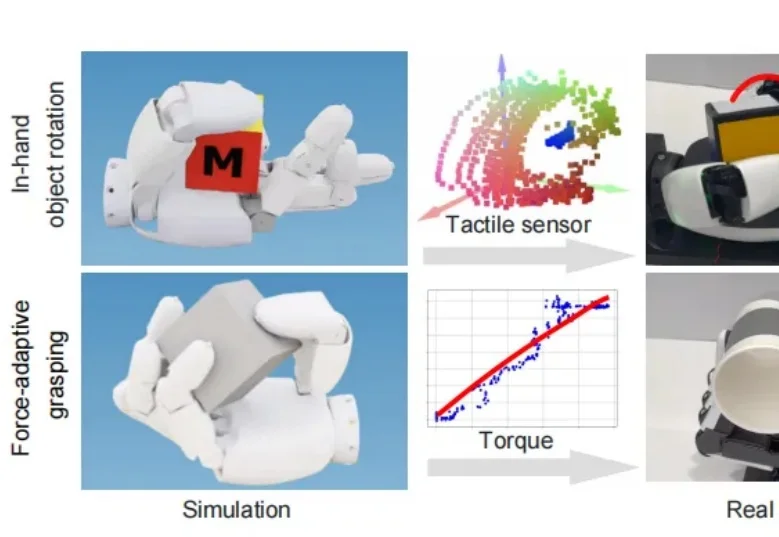
实现具备人类水平的灵巧操作能力,是机器人学领域长期以来的核心挑战之一。尽管多指灵巧手在硬件上具备了类似人类的潜力,但由于接触丰富的物理特性和非理想的驱动机制,训练能够直接部署在真实硬件上的控制策略仍然非常困难。

在机器人操作领域,一个长期悬而未决的核心问题始终困扰着研究者: 面对形态各异的灵巧手,我们是否注定要为每一种手型单独设计表示方式与控制策略?
从灵巧手开始「制造时间」:揭秘 Sharpa 的通用人工智能之路 作者|Li Yuan 编辑|郑玄 今年的春晚,已经变成机器人大战了。 在热闹之下,笔者关注到了一个很有趣的细节,相比于去年的机器人,今

灵初智能选择了一条更为激进的技术路线:「人类中心(Human-Centric)」。他们自主研发了全球首个灵巧手真实世界数采引擎Psi-SynEngine。

「临界点」在2025年已卖了数千只灵巧手。
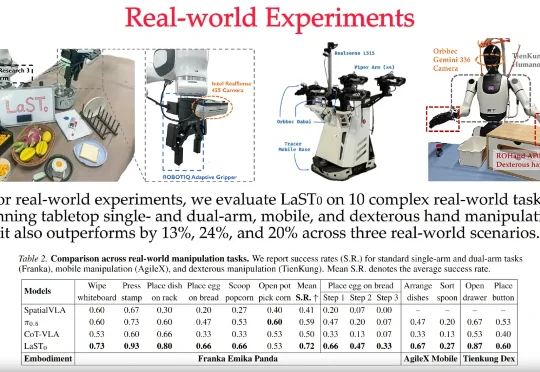
LaST₀团队 投稿 量子位 | 公众号 QbitAI 近日,至简动力、北京大学、香港中文大学、北京人形机器人创新中心提出了一种名为LaST₀的全新隐空间推理VLA模型,在基于Transformer混

一个背景深厚的新玩家强势入局。